

























 |
Artiglieria esplosiva di disposizione del robot di piccola dimensione di EOD con gli aerei - lega di alluminio del grado
Dettagli:
| Luogo di origine: | Made in China |
| Marca: | HEWEI |
| Certificazione: | CE,ROHS,ISO,etc |
| Numero di modello: | HW-18 |
Termini di pagamento e spedizione:
| Quantità di ordine minimo: | 1 set |
|---|---|
| Prezzo: | FOB Shenzhen / Beijing |
| Imballaggi particolari: | imballaggio del cartone, caso di legno, ecc |
| Tempi di consegna: | 10-15 giorni lavorativi |
| Termini di pagamento: | Western Union, T/T, l/C |
| Capacità di alimentazione: | 30 insiemi/mese |
|
Informazioni dettagliate |
|||
| Materiale corpo: | lega di alluminio del Aereo-grado, lavorare di precisione | Peso: | 92.8KG (senza accessori, pacchetto e gruppo di regolazione) |
|---|---|---|---|
| Dimensione: | Lunghezza 920mm * larghezza 625mm * altezza 515mm | Batteria: | Batteria ricaricabile acida al piombo di DC24V |
| Orario di lavoro: | Meno di 5 ore | Diffusione massima di armi meccaniche: | 1960mm |
| Velocità massima del movimento: | 1m/s (nota: il telecomando, la velocità stepless della velocità control.max è circa 1m/s basato sull | abilità del grado: | Può scalare il pendio di 45° e fermarsi costantemente sul pendio. |
| Capacità del carico: | 160Kg | Capacità di resistenza: | ≥500N |
| Evidenziare: | Attrezzatura di smaltimento di esplosivi militari,dispositivo di eod |
||
Descrizione di prodotto
Robot di (EOD) di smaltimento di esplosivi militari
![]()
Panoramica del prodotto:
Il robot di EOD consiste del corpo del robot mobile e del sistema di controllo.
Il corpo del robot mobile si compone della scatola, del motore elettrico, del sistema di azionamento, del braccio meccanico, della testa della culla, del sistema di controllo, dell'illuminazione, della base del disruptivo degli esplosivi, della batteria ricaricabile, dell'anello di rimorchio, ecc.
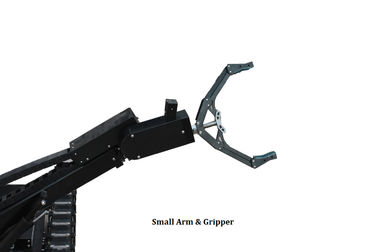
Il braccio meccanico si compone di grande braccio, del braccio telescopico, dell'arma leggera e della pinza di presa. È installato sul bacino del rene ed il suo diametro è 220mm. Il doppio palo elettrico di soggiorno ed il doppio palo pneumatico di soggiorno sono installati sul braccio meccanico; La testa della culla è pieghevole. Il palo, la macchina fotografica e l'antenna pneumatici di soggiorno sono installati sulla testa della culla; Il sistema di controllo si compone della macchina fotografica, del monitor, dell'antenna, ecc; Un insieme del LED si accende sulla parte anteriore del corpo e sul retro del corpo; Questo sistema è alimentato dalla batteria ricaricabile acida al piombo di DC24V; Il sistema di controllo si compone del sistema di controllo concentrare, del gruppo di regolazione, ecc.
Il touch screen facoltativo del sistema di controllo è adatto a principianti da funzionare. Accessori facoltativi del corpo del robot di EOD: coda, antenna di trasmissione senza fili, strumento dell'hardware (includa la taglierina, il gancio, il rastrello, il trapano ed il tagliatore).
Ambiente di applicazione:
- Trasferimento e distruzione degli oggetti sospettosi nei luoghi pubblici (metropolitana, aeroporto, stazione ferroviaria, centro commerciale, centro congressi, ecc.)
- Applicato in ambiente come eliminazione della persona buona a nulla, eliminazione della bomba di bordo della strada ed eliminazione della miniera, ecc.
- Andare a prendere e trasferimento del materiale nell'ambito dell'ambiente biologico e tossico pericoloso.
- Ricognizione, rilevazione, andare a prendere del materiale e trasferimento all'interno dell'ambiente di rovine dopo
- disastro.
- Andare a prendere e trasferimento del materiale nell'ambito dell'ambiente di radiazione nucleare, rilevazione semplice e
- lavoro di manutenzione.
Parametro tecnico:
| Nome di parametro | Indice di parametro |
| Corpo del robot | |
| Materiale del corpo | lega di alluminio del Aereo-grado, lavorare di precisione |
| Peso | 92.8KG (senza accessori, pacchetto e gruppo di regolazione) |
| Dimensione | Lunghezza 920mm * larghezza 625mm * altezza 515mm |
| Batteria | Batteria ricaricabile acida al piombo di DC24V |
| Orario di lavoro | Meno di 5 ore |
| Gamma massima di espansione della pinza di presa | 255mm |
| Diffusione massima di armi meccaniche | 1960mm |
| Lunghezza estendibile del braccio meccanico | 500mm |
| Velocità massima del movimento | 1m/s (nota: il telecomando, la velocità stepless della velocità control.max è circa 1m/s basato sulla batteria 24V.) |
| Abilità del grado | Può scalare il pendio di 45° e fermarsi costantemente sul pendio. |
| Abilità rampicante delle scale | Con aiuto senza trazione, può scalare su e giù le scale di altezza di punto di 160mm e del pendio 45°angle. |
| capacità di Sovra-ostacolo | Può attraversare l'ostacolo di altezza di 320mm. |
| Abilità di tornitura | In terra orizzontale del cemento o fondo stradale bituminoso, il robot può girare 360º in senso orario o antiorario. |
| Larghezza limitata del passaggio | ≥700mm |
| Capacità del carico | 160KG |
| Capacità di resistenza | ≥500N |
| Afferrare capacità | 10/40KG (allunghi fuori e disegni indietro). Può muoversi con la pressione dei pesi di 40KG e non cadrà (misura reale). |
| 6 braccio meccanico DOFs | Apertura e closing della pinza di presa |
| Angolo di rotazione | La pinza di presa può girare 360º in senso orario ed antiorario; |
| Numero delle macchine fotografiche | 4 |
| Macchina fotografica di andata | Induzione di infrarosso di colore |
| Macchina fotografica a rovescio | Induzione di infrarosso di colore |
| Macchina fotografica focale capa della culla varia | Induzione di infrarosso di colore |
| Macchina fotografica della pinza di presa | Induzione di infrarosso di colore |
| Proiettore | Un proiettore di due gruppi LED (ogni gruppo sulla parte anteriore e sulla parte posteriore) |
| Controlli la distanza | Controllo senza fili: ≥500m; controllo di cavo: 100m (200m facoltativi); |
| Gruppo di regolazione | Tramite bottoni e la maniglia del gruppo di regolazione, gli operatori possono controllare il video commutatore, zoom, muoversi, culla che girano, proiettore, braccio telescopico, apertura e closing della pinza di presa, arma leggera che girano, grande braccio che di sollevamento, bacino del rene che girano, polso che girano, ecc. |
| Prestazione anti-interferenza | A. secondo la prova della scarica elettrostatica di |
| Testa della culla del monitoraggio | |
| Progettazione modulare | La testa della culla senza alcun collegamento esterno può essere rimossa facilmente dal corpo del robot. |
| Video registrazione | La culla può registrare il video in tempo reale per l'esame facile in seguito. |
| DOFs della testa della culla | 2 indipendente DOFs, velocità di rotazione regolabile: |
| Terminale di controllo delle operazioni | |
| Gruppo di regolazione | Portatile, impermeabile, antipolvere, ad alta resistenza |
| Dimensione | ≤ L 460mm * W 370mm * H 260mm |
| Peso | ≤ 10kg |
| Dimensione dell'esposizione | LCD dell'HB 12-inch, ampio angolo di visione, chiare immagini all'aperto |
| Operazione | Maniglia di alta qualità dell'attuatore, progettazione di interfaccia umana del software, osservazione facile ed operazione conveniente |
| Mostri l'immagine | Può controllare simultaneamente 4 segnali video o amplificare esclusivamente uno di 4 segnali video. |
| Visualizzazione delle informazioni | La simulazione in tempo reale mostra le informazioni di velocità del robot, di tensione, di posizione, ecc. |
| Batteria | 24V batteria al litio ricaricabile, ≥ di orario di lavoro 5,1 ore una volta completamente caricato. |
| Controllo del touch screen | Il controllo facoltativo del touch screen è adatto a principianti ad uso. |